省スペース、高速ロボット ESシリーズ ES06/ES12
ロボット
本文
ES06/ES12
省スペース、高速ロボット ESシリーズ
|
ES06
ES12 |
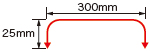
●高速搬送
標準アーチモーションの ES06 : 0.29sec ES12 : 0.30sec ●ケーブル干渉防止
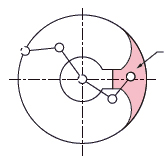
●設置スペースのフル活用
旋回軸動作範囲は全周、背面エリアもアクセス可能 |
|
ES06
ES12 |
●高速搬送
標準アーチモーションの ES06 : 0.29sec ES12 : 0.30sec ●ケーブル干渉防止
●設置スペースのフル活用
旋回軸動作範囲は全周、背面エリアもアクセス可能 |