ロボット監視ユニット RMU
ロボット
本文
ロボット監視ユニット RMU
ロボットの位置、速度を監視し、人とロボットの共同作業が可能
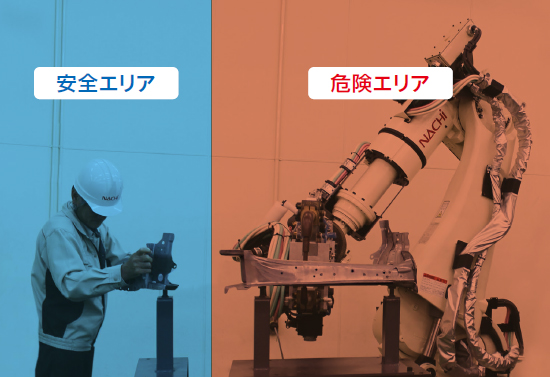
ロボットの位置及び速度を監視
- 人とロボットの共同作業をサポート(ISO10128に適合)
- ロボットの動作範囲を規制(周辺設備のコストダウン)
安全シーケンス機能
- 安全関連信号(動力供給、非常停止など)を2重化し、安全性を向上。
省スペース化
ロボットの動作範囲を制限し、安全柵の設置スペースを小さく出来ます。
仮想安全柵機能によりロボットの動作範囲を規制し、安全柵を最小化できると共に動作範囲を規制するリミットスイッチ等も不要になります。
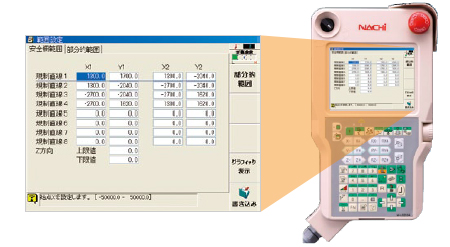
簡単操作(パソコン不要)
各パラメータをティーチペンダントで簡単設定
人とロボットの共同作業
人とロボットの共同作業を可能とします。動作規制範囲の切り替え機能によりロボットの動作規制範囲を外部信号で切り替えることができます。
例えば、人がジグにワークをセットしているときはロボットが進入できないように動作を規制します。
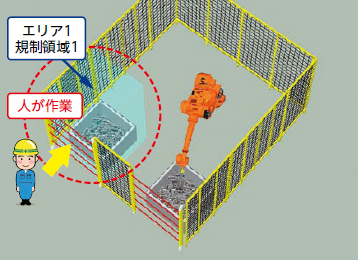
人が作業
人が作業するエリア(エリア1 規制領域1)は、ロボットが侵入できないように規制
![]()
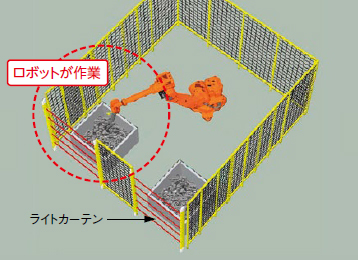
ロボットが作業
![]()
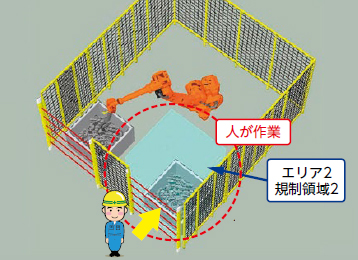
人が作業
人が作業するエリア(エリア2 規制領域2)は、ロボットが侵入できないように規制
規制領域は、ライトカーテン等の信号でロボットの侵入を禁止することが出来ます
安全性能
ISO 10218-1(産業用ロボットのための安全要求事項)に適合し、ロボットと人の共同作業が可能となる安全基準をみたすことができます。
適合規格
- ISO 10218-1 産業用ロボットのための安全要求事項
- ISO 13849-1 (PLeに適合) 制御システムの安全関連部
- IEC 61508:2010 (SIL3に適合) 電子式安全関連システムの機能安全
安全ネットワーク対応(オプション)
EtherNet/IP Safety、PROFINET safetyに対応し、非常停止信号等の安全信号を通信で入力することができます。
従来の安全柵設置位置
監視ユニット導入による安全柵設置位置