NACHI Handling Robot MZ12H : Multipurpose robot
Robots
Main text
Multipurpose robot MZ12H/15H
Basic Specification of Robot
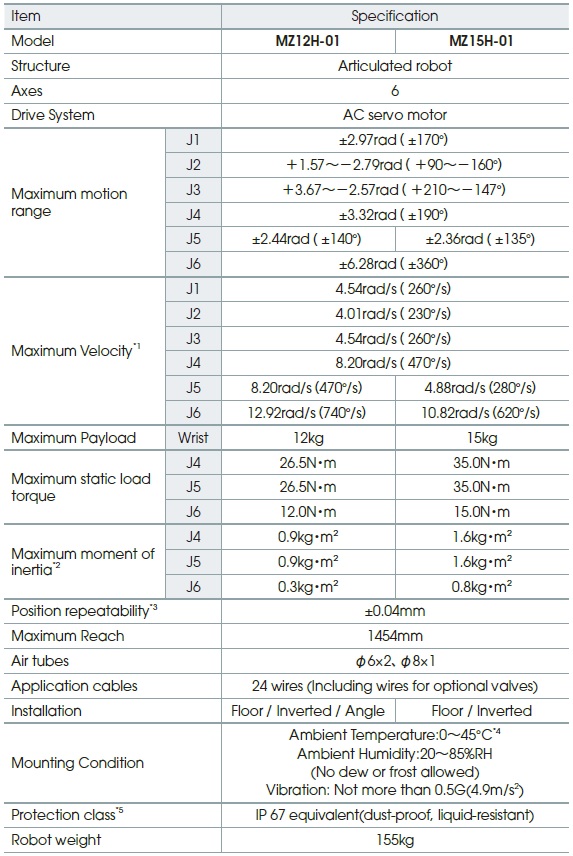
1[rad]=180/π[°] 1[N·m]=1/9.8[kgf·m]
- Explosion-proof version is not available.
*1 The maximum velocity in the chart is the maximum value.
It will change depending on the operation program and the wrist load condition.
*2 Depends on wrist load condition.
*3 JIS B 8432 conformance.
*4 Up to a maximum of 1000m from sea level. Ambient temperature is reduced
when allowable altitude is exceeded.
*5 Fluids that cause the deterioration of sealants, such as gasoline-based cutting
fluids, chlorine, alkalines, acids and organic solvents cannot be used. The main
robot cables are IP65.