商品情報
Products
ロボット
ハンドリング・シーリング
■壁掛型省スペースロボット MZ12W

●省スペース
- 広い動作範囲により、走行装置の設置が不要
- 第1軸の振り子動作により、通路のような狭小レイアウトでも作業可能
●高速・高精度
- 第1軸の壁掛け構造とファインモーション機能により、軌跡精度を向上
●パワフルな手首
- MZ12Hの2倍以上の手首トルク
- 大型ワークやハンドに対応
適用例
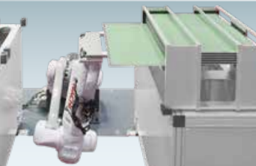
基板搬送工程のラック収納に最適
→基板挿入ハンドがロボットアームより上のため基板へのダスト付着リスクが低減
複数台使用することで、走行軸無しでラック間の積載にも適応可能
省スペース
通常のロボットの場合→開口部の前にロボットを置くため走行軸を設置する必要があるが、メンテナンス性に難・一品一様の設計であるため高価・幅の確保が必要、と複数のデメリットあり
MZ12Wの場合→開口部付近を避けて、ロボットを置くことができるためメンテナンス性向上
広い動作範囲により走行軸がなくとも設備に届き、安価

パワフルな手首
MZ12Hの2倍以上の手首トルクにより大型ワークやハンドに対応
MZ12Wの場合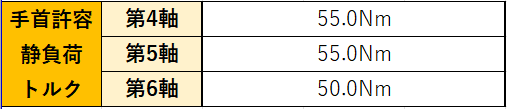
MZ12Hの場合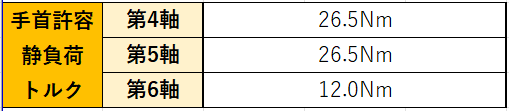
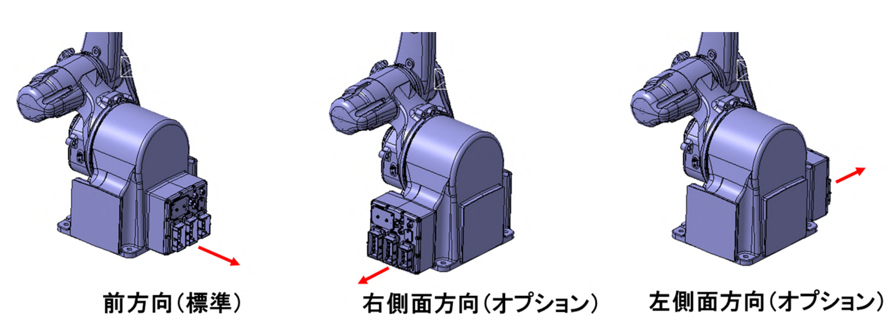
ハーネスが各方向に選択可能
ハーネスが各方向に選択可能であり、様々なレイアウトへ柔軟に対応
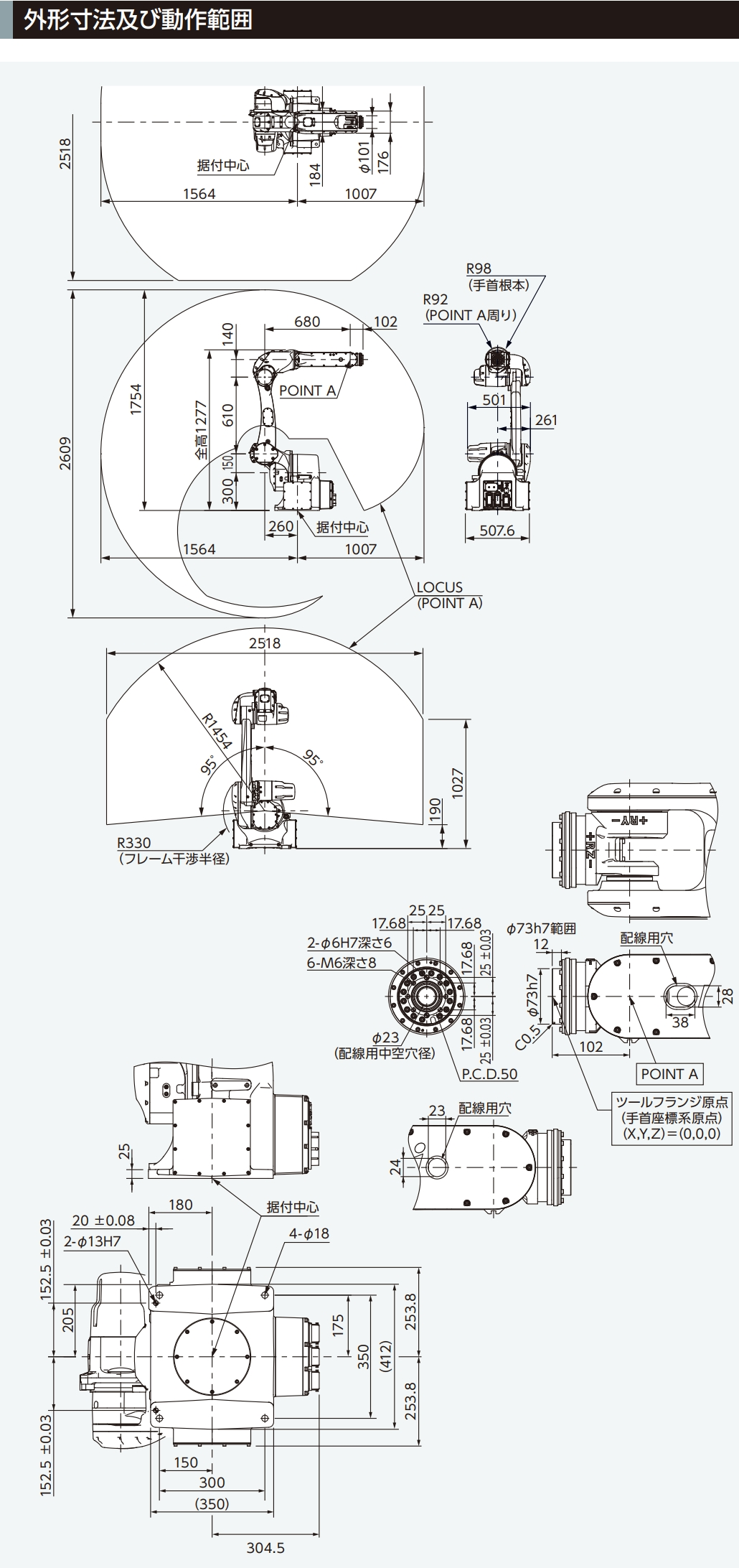
MZ12W動作範囲
MZ12W仕様
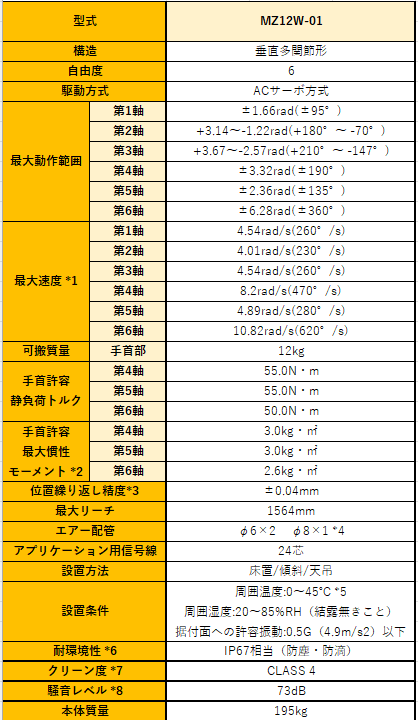
1[rad] = 180/π[°], 1[N・m] = 1/9.8[kgf・m]
※ 第1軸~第6軸は、コントローラ画面では各々J1~J6 と表示されます。
※ 製品改良のため、定格、仕様、寸法などの一部を予告なしに変更することがあります。
※ 防爆対応はしていません
*1: 表内の最大速度は最大値であり、作業プログラムや手首負荷条件によって変化します。
*2: 手首許容慣性モーメントは、手首負荷条件により異なりますので、注意してください。
*3: 「JIS B 8432」に準拠しています。
*4: クリーン環境仕様の内蔵バルブオプション選択時はφ6x1 となります。
*5: 海抜 1,000m 以下でご使用の場合です。許容高度を超える場合、周囲温度が制約を受けます。制御装置は、周囲温度:0~40℃となります。
*6: 有機溶剤、酸、アルカリ、塩素系、ガソリン系切削液などシール部材を劣化させる液体は使用できません。
ワイヤーハーネス部は、IP65 相当、制御装置(CFDs-3000)は IP20 相当です。
補足:耐環境性を参照ください。
*7: ISO 14644-1 に準拠した社内評価に基づきます。クリーン度を確保する場合は、ダウンフローのあるクリーンルーム内に設置してください。ロボットは防塵梱包されておりませんので、クリーンルーム搬入の際はロボットの埃・粉塵の除去および拭き取り清掃が必要です。
*8: JIS Z 8737-1 (ISO 11201)に従って測定したA荷重等価騒音レベルです。(定格負荷、最高速度での運転)
カタログダウンロード
Catalog Download
Copyright © 2025 Nachi-fujikoshi corp. All Rights Reserved.
Copyright © 2025 Nachi-fujikoshi corp. All Rights Reserved.