商品情報
Products
ロボット
ハンドリング・シーリング
■新型協働ロボット MZS05

『人感知で自ら止まるロボット』
ぶつかる前に止まり、自動で作業を再開
クラストップレベルの高速・高精度動作で安全性と生産性を両立した協働ロボットの誕生
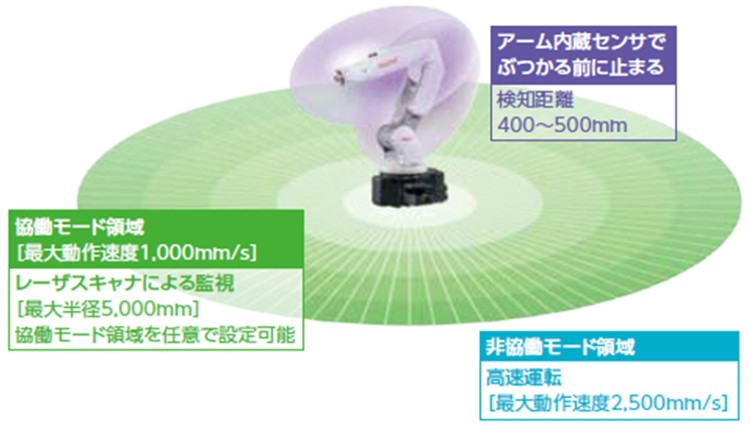
- 「安心・安全」複数のセンサがロボット周辺を常時監視して、ぶつかる前に止まる
- 「高速性」「生産性」ロボット停止後の再起動が不要。自動で作業を再開。
- クラストップレベルの高速・高精度動作
衝突検知機能を備え、協働ロボットの安全性を保証する各種認証準拠ISO13849-1、ISO10218-1、ISO/TS15066
※MZS05-01 および制御装置 CFDs-0000C は、以下に示す安全規格の第三者認証を取得しています。
ISO 10218-1:2011 産業用ロボットのための安全要求
EN ISO 10218-1:2011 欧州版産業用ロボット安全要求
ISO 13849-1:2023 制御システムの安全関連部
ISO/TS 15066:2016 協働ロボットのための安全要求
1:ベースフレームに内蔵されたレーザスキャナによる接触前停止機能(*)
(*) レーザスキャナによる距離情報とロボット制御装置のツール先端情報による接近判定
2:アームに内蔵された接近センサによる接触前停止機能
1、2項の本機能は「機能安全」に対応していない非安全機能です。 協働ロボット使用時のリスクアセスメントにおいては、機能安全に対応した衝突検知機能や位置・速度監視機能を前提にリスク評価を行ってください。
詳しくは、標準仕様書ならびに取扱説明書を参照してください。
特長
● ものづくり現場の『頼れる同僚』
- ヒトと共に作業し、「怖さ」を感じさせない生産性を落とさない「安心」「安全」な協働ロボット
● 3種類のセンサを標準搭載
- トルクセンサ
- レーザースキャナ
- 接近センサ(人の侵入・接近をセンシング)
- 見やすくわかりやすいLED灯がロボットの動作状態に合わせ変化

クラストップレベルの高速・高精度
MZS05は、MZシリーズと共通のメカニズムを採用し、クラストップレベルの高速動作と高精度を実現しています。

幅広い用途に対応
スリム・コンパクトなボディーと安全柵レスにより、狭いスペースでも導入可能。AMRへの搭載など物流分野においても様々に応用できます。また、優れたクリーン性能(ISOクラス4)と豊富なアプリケーションで、電機・電子分野から食品などの三品分野まで、多種多様な業種に対応が可能です。

中空手首構造が接触リスクを低減
アーム内にケーブル類を収納することで接触リスクを低減し、パーツ同士の干渉を抑えることで信頼性も向上。スッキリとした外観も得られます。

優れた安全性
- 衝突検知機能を備え、協働ロボットの安全性を保証する各種認証準拠
ISO13849-1、ISO10218-1、ISO/TS15066 - 挟まれリスクを最小化する形状設計・安全ソフト機能

外形寸法および動作範囲
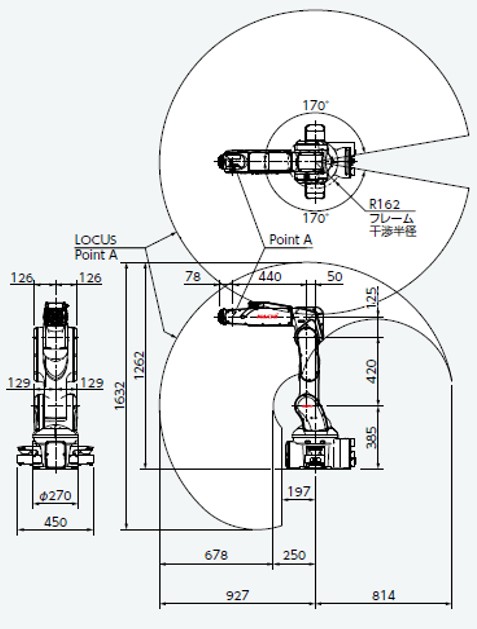
(*1) 製品改良のため、定格、仕様、外寸などの一部を予告なしに変更することがあります。
(*2) 本製品の最終使用者が軍事関係、または兵器等の製造用に使用する場合、「外国為替及び外国貿易法」の定める輸出規制の対象となる事があります。輸出される際には、十分な審査及び必要な輸出手続きをお取り下さい。
本体仕様
 1[rad]=180/π[°]、1[N・m]=1/9.8[kgf・m]
1[rad]=180/π[°]、1[N・m]=1/9.8[kgf・m]※製品改良のため、定格、仕様、寸法などの一部を予告なしに変更することがあります。
※ 防爆対応はしていません。
*1: 第2軸、第3軸、第5軸は最大動作端まで稼働させるとツールやワークが無くても挟み込まれるリスクがあります。出荷時はそのリスクを排除するために稼働範囲がロボット監視ユニット(RMU50-11。ISO13849-1に適合)により制限されています。実際のご使用環境に応じたリスクアセスメントにてリスクが低減されたと確認された場合に限り、動作範囲を変更するようにしてください。搭載するツールやワークの形状により、稼働範囲の制限がかかっていても挟み込まれる可能性があります。
*2: 表内の最大速度は最大値であり、作業プログラムや手首負荷条件によって変化します。本仕様は通常再生モード時の項目毎の最大値を示しています。
*3: 基本安全規格ISO12100に準拠したリスクアセスメントを実施し、衝突する部位に応じた動作速度を決定する必要があります。
*4: 手首許容慣性モーメントは、手首負荷条件により異なりますので、注意してください。
*5: 「JIS B 8432」に準拠しています。
*6: 据付角度30°以上の傾斜設置はできません。設置角度30°未満となるように設置をしてください。
*7: 海抜1,000m以下でご使用の場合です。許容高度を超える場合、周囲温度が制約を受けます。
*8: 協働運転で使用する際は床やハンドの振動によってロボットが停止する場合があります。使用の際は振動発生源を排除する必要があります。
*9: 有機溶剤、酸、アルカリ、塩素系、ガソリン系切削液などシール部材を劣化させる液体は使用できません。
*10: 飛沫のかかる環境やミスト環境では、接近センサが反応し、ロボットが停止する場合があります。
*11: ISO 14644-1に準拠した社内評価に基づきます。クリーン度を確保する場合は、ダウンフローのあるクリーンルーム内に設置してください。ロボットは防塵梱包されておりませんので、クリーンルーム搬入の際はロボットの埃・粉塵の除去および拭き取り清掃が必要です。
*12: JIS Z 8737-1(ISO 11201)に従って測定したA荷重等価騒音レベルです。(定格負荷、最高速度での運転)
紹介動画
カタログダウンロード
Catalog Download
Copyright © 2025 Nachi-fujikoshi corp. All Rights Reserved.
Copyright © 2025 Nachi-fujikoshi corp. All Rights Reserved.